HESS J1857+026 - another VHE gamma-ray source demystified?
July 2008

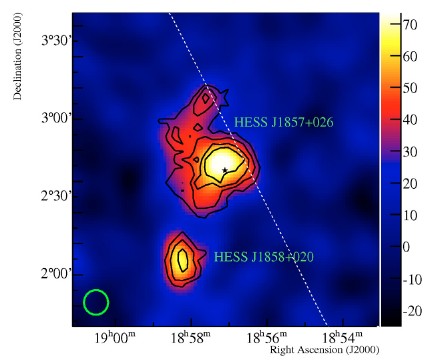
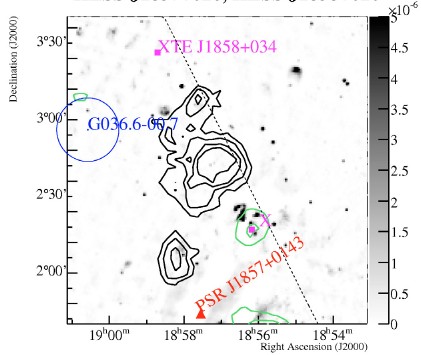
The H.E.S.S. Galactic Plane Survey (Aharonian et al. 2005, 2006, 2008, SOM 12/07) resulted in the discovery of a number of gamma-ray sources without obvious counterparts in other wavelength regimes. One recent example are the sources HESS J1857+026 and HESS J1858+020 (Fig.1), located close to each other near the Galactic plane. Both objects are extended gamma-ray sources. A view of the region in other wavelengths shows no plausible counterparts (Fig. 2); a pulsar with high spin-down energy loss and a supernova remnant are both too far away from the gamma-ray sources.
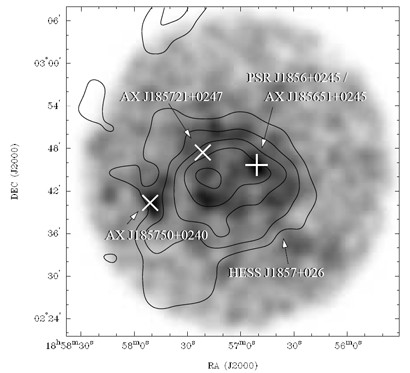
This situation changed with the recent discovery by Hessels et al. (2008) of a new pulsar, PSR J1856+0245, by the PALFA survey, aiming to survey the Galaxy with improved sensitivity using the ALFA receiver at the giant Arecibo radio dish. PSR J1856+0245 was first detected in a 268-s survey observation in April 2006. Timing observations with the Arecibo and Jodrell Bank radio telescopes determined, beyond the spin period of 81 ms, the spin-down energy loss of 4.6 x 1036 ergs/s and the characteristic age of 21000 years, and provided a distance estimate of about 9 kpc (Hessels et al. 2008). The pulsar is located within the gamma-ray source, slightly offset from its center (Fig. 3). Electrons accelerated near the pulsar are presumable responsible for gamma-ray production, converting about 3% of the pulsar's spin down energy loss into high energy gamma rays. In ASCA X-ray images, a possible X-ray pulsar wind nebula is seen at the location of the pulsar (Fig. 3); however, gamma-rays are a more sensitive diagnostic and track electrons streaming away from the pulsar out to distances of a fraction of a degree, equivalent to tens of parsecs.
As more and more pulsar associations of very-high-energy gamma ray sources are discovered - see SOM 5/08 for another recent example - it is becoming evident that pulsars account for a large fraction of H.E.S.S. gamma-ray sources in our Galacy.
References:
"H.E.S.S. VHE gamma-ray sources without identified counterparts", H.E.S.S. collaboration, F. Aharonian et al., arXiv:0712.1173