|
CFEL - ASG Software Suite
2.5.0
CASS
|
Namespaces | |
| commonmode | |
| Direction | |
Classes | |
| class | AboveNoiseFinder |
| will find pixels by comparing them to a "noise" map More... | |
| class | AdvancedDetector |
| An Advanced Pixel Detector. More... | |
| class | CoalescingBase |
| base class for all coalescing functors More... | |
| class | CommonData |
| Data used commonly for one AdvancedDetector. More... | |
| class | Converter |
| Converter for pnCCD, CsPad and commercial CCD Data. More... | |
| class | Detector |
| Detector containing a ccd camera image. More... | |
| class | DetectorHelper |
| Helper for Advanced Pixel Detector related Postprocessors. More... | |
| struct | DetectorName |
| retrieve the DetectorName More... | |
| class | Device |
| the device containing pixel detector data More... | |
| class | FixedMaps |
| Creates maps from a fixed number of Frames. More... | |
| struct | Frame |
| A Frame of an advance Pixel Detector. More... | |
| class | FrameProcessorBase |
| base class for all frame processors More... | |
| class | Frms6Reader |
| class for reading frms6 files More... | |
| class | GainCalibration |
| Creates a gain calibration. More... | |
| struct | Hit |
| A Hit on a pixel detector. More... | |
| class | HLLProcessor |
| HLL like frame processing. More... | |
| class | HotPixelsFinder |
| hotpixels finder More... | |
| struct | isNeighbour |
| check if pixel is neighbour More... | |
| class | MapCreatorBase |
| base class for all correction map creators More... | |
| class | MovingMaps |
| Creates maps from the last number of maps. More... | |
| class | NoProcess |
| Class with no processing. More... | |
| class | OnlineFixedCreator |
| Creates the maps fast and simple. More... | |
| class | OnlineFixedCreatorCommonMode |
| Creates the maps fast and simple with commond mode correction. More... | |
| struct | Pixel |
| Pixel definition. More... | |
| class | PixelFinderBase |
| base class for pixel finders More... | |
| class | PixelFinderSimple |
| simple algorithm to find pixels of interest More... | |
| class | PixelFinderSimpleMoreOptions |
| same as simple, but with adjustable box size More... | |
| class | RAWSSSReader |
| class for reading commercial ccd files More... | |
| class | SHMStreamer |
| deserialize the data stream of shm2tcp program More... | |
| class | SimpleCoalesce |
| simple coalescing of pixels More... | |
| class | WithinRange |
| within range More... | |
Typedefs | |
| typedef pair< int, int > | index_t |
| an index within a matrix More... | |
| typedef pair< float, float > | indexf_t |
| an index within a matrix but with with floating point precision More... | |
Functions | |
| Detector & | retrieveDet (CASSEvent &evt, const Device::detectors_t::key_type &key) |
| extract the right detector from the CASSEvent More... | |
| vector< uint8_t > | extractPayload (const Pds::Xtc *xtc) |
| copy payload of xtc into a bytearray More... | |
| void | copyAdditionalPnccdInfo (const Pds::PNCCD::ConfigV1 &, Detector &det, size_t &rowsOfSegment, size_t &columnsOfSegment) |
| copy additional info about the pnCCD More... | |
| void | copyAdditionalPnccdInfo (const Pds::PNCCD::ConfigV2 &cfg, Detector &det, size_t &rowsOfSegment, size_t &columnsOfSegment) |
| copy additional info about the pnCCD More... | |
| template<typename ConfigType > | |
| void | copyPnCCDFrame (const Pds::Xtc *xtc, const ConfigType &cfg, Detector &det) |
| copy the pnCCD frame into the detector More... | |
| template<typename ConfigType > | |
| void | copyCsPadFrame (const Pds::Xtc *xtc, const ConfigType &cfg, Detector &det) |
| copy the cspad frame to the detector More... | |
| template<typename ConfigType > | |
| void | copyEpixFrame (const Pds::Epix::ElementV3 &element, const ConfigType &cfg, Detector &det) |
| copy the epix frame to the detector More... | |
| void | findNeighbours (uint16_t depth, const uint16_t maxDepth, Pixel &pixel, Direction::direction direction, const Frame &frame, CoalescingBase::pixels_t &pixels, CoalescingBase::pixels_t &splitpixelslist) |
| find all neighbours of a pixel More... | |
| Hit | coalesce (const CoalescingBase::pixels_t &splitpixelslist) |
| coalesce the pixels More... | |
| bool | shouldCoalescePixel (const CoalescingBase::pixels_t &splitpixelslist, const float mipThreshold, const Frame &frame) |
| check whether list of pixel should be coalesced More... | |
| void | readHLLOffsetFile (const string &filename, CommonData &data) |
| will read the file containing the offset and noise map in the hll format More... | |
| void | saveHLLOffsetFile (const string &filename, CommonData &data) |
| save the maps to a hll type darkcal file More... | |
| void | readCASSOffsetFile (const string &filename, CommonData &data) |
| will read the file containing the offset and noise map in the former CASS format More... | |
| void | saveCASSOffsetFile (const string &filename, CommonData &data) |
| will save the file containing the offset and noise map in the former CASS format More... | |
| void | readHLLGainFile (const string &filename, CommonData &data) |
| will read the file containing the gain and cte corretion factors in the HLL format More... | |
| void | readCASSGainFile (const string &filename, CommonData &data) |
| read the CASS generated gain file More... | |
| void | saveCASSGainFile (const string &filename, const CommonData &data) |
| save the gain map to CASS style file More... | |
| void | readCASSHotPixFile (const string &filename, CommonData &data) |
| read the CASS generated hotpixels file More... | |
| void | saveCASSHotPixFile (const string &filename, const CommonData &data) |
| save the hot pixels to CASS style file More... | |
| void | isSameSize (const Frame &frame, CommonData &data) |
| check whether the frame has the same size as the maps. More... | |
| void | createPixelList (const Detector::frame_t::value_type &offset, const Detector::frame_t::value_type &noise, const MapCreatorBase::storage_t &storage, size_t pixel, bool exclude, Detector::frame_t &pixellist) |
| create the list of pixels that are non events More... | |
| Detector::frame_t::value_type | calcNoise (const Detector::frame_t &values, const Detector::frame_t::value_type &mean) |
| calulate the standart deviation of distribution More... | |
| Detector::frame_t::value_type | calcMean (Detector::frame_t &values, size_t mindisregard, size_t maxdisregard) |
| calculate the mean of the distribution More... | |
| Detector::frame_t::value_type | calcMedian (Detector::frame_t &values, size_t mindisregard, size_t maxdisregard) |
| calculate the median of the distribution More... | |
| template<class containerType > | |
| Detector::frame_t::value_type | getConstant (const containerType &) |
| get a constant 1 More... | |
| template<class containerType > | |
| Detector::frame_t::value_type | getZValue (const containerType &container) |
| retrieve the z value of the container More... | |
| index_t | operator+ (const index_t &lhs, const index_t &rhs) |
| operates a plus on two indices More... | |
| index_t | operator- (const index_t &lhs, const index_t &rhs) |
| operates a minus on two indices More... | |
| index_t | operator* (const index_t &lhs, const index_t &rhs) |
| operates times on two indices More... | |
| indexf_t | operator/ (const indexf_t &lhs, const indexf_t &rhs) |
| operates devides on two indices More... | |
| bool | operator< (const indexf_t &lhs, const indexf_t::first_type rhs) |
| operates less of an indices to a scalar More... | |
| index_t::first_type | dot (const index_t &lhs, const index_t &rhs) |
| calculate the scalar product of two indices More... | |
| size_t | TwoD2OneD (const index_t &matrixIndex, const size_t width) |
| convert matrix index to linearised index More... | |
| index_t | OneD2TwoD (const size_t linearisedIndex, const size_t width) |
| convert linearised index to matrixindex More... | |
| void | addCircle (CommonData &data, CASSSettings &s) |
| add a circle to the mask More... | |
| void | addSquare (CommonData &data, CASSSettings &s) |
| add a square element to the mask More... | |
| void | addEllipse (CommonData &data, CASSSettings &s) |
| add a ellipsodial element to the mask More... | |
| void | addRing (CommonData &data, CASSSettings &s) |
| add a ring More... | |
| void | addTriangle (CommonData &data, CASSSettings &s) |
| add a triangluar element to the mask More... | |
| void | createCASSMask (CommonData &data, CASSSettings &s) |
| create the mask More... | |
| typedef pair<int,int> cass::pixeldetector::index_t |
an index within a matrix
Definition at line 32 of file pixeldetector_mask.cpp.
| typedef pair<float,float> cass::pixeldetector::indexf_t |
an index within a matrix but with with floating point precision
Definition at line 35 of file pixeldetector_mask.cpp.
| void cass::pixeldetector::addCircle | ( | CommonData & | data, |
| CASSSettings & | s | ||
| ) |
add a circle to the mask
goes through the sqare that conatins the cirlce and checks whether the index is covered by the circle. If so the mask at that index will be set to false.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{CenterX|CenterY}
The center of the circle. Default is 500|500.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{Radius}
The radius of the circle. Default is 2.
| data | the container containing the mask where the element should be added |
| s | the settings element to read the mask element parameters from |
Definition at line 175 of file pixeldetector_mask.cpp.
References cass::pixeldetector::CommonData::columns, cass::pixeldetector::CommonData::lock, cass::pixeldetector::CommonData::mask, cass::pixeldetector::CommonData::rows, cass::toString(), TwoD2OneD(), QSettings::value(), and cass::ACQIRIS::width.
Referenced by createCASSMask().
| void cass::pixeldetector::addEllipse | ( | CommonData & | data, |
| CASSSettings & | s | ||
| ) |
add a ellipsodial element to the mask
adds an ellipsodial to the mask. Will iterate trhough the sqare that contains the ellipse and checks which pixels should be masked.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{CenterX|CenterY}
The central point of the ellipse. Default is 500|500.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{SemiAxisX|SemiAxisY}
The semi axis along x and y of the ellipse. By definition the longer one defines the major axis and the smaller on the minor axis. Default is 5|4.
| data | the container containing the mask where the element should be added |
| s | the settings element to read the mask element parameters from |
Definition at line 278 of file pixeldetector_mask.cpp.
References cass::pixeldetector::CommonData::columns, cass::pixeldetector::CommonData::lock, cass::pixeldetector::CommonData::mask, cass::pixeldetector::CommonData::rows, cass::toString(), TwoD2OneD(), QSettings::value(), and cass::ACQIRIS::width.
Referenced by createCASSMask().
| void cass::pixeldetector::addRing | ( | CommonData & | data, |
| CASSSettings & | s | ||
| ) |
add a ring
define the ring by two ellipses; an inner and outer ellipse. The area covered by the out but not by the inner will be masked. The two ellipsoids can have different centers and axis. Therefore the ring can take any shape.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{InnerCenterX|InnerCenterY}
The central point of the inner ellipse. Default is 500|500.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{InnerSemiAxisX|InnerSemiAxisY}
The semi axis along x and y of the inner ellipse. By definition the longer one defines the major axis and the smaller on the minor axis. Default is 5|4.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{OuterCenterX|OuterCenterY}
The central point of the outer ellipse. Default is 500|500.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{OuterSemiAxisX|OuterSemiAxisY}
The semi axis along x and y of the outer ellipse. By definition the longer one defines the major axis and the smaller on the minor axis. Default is 20|20.
Definition at line 340 of file pixeldetector_mask.cpp.
References cass::pixeldetector::CommonData::columns, cass::pixeldetector::CommonData::lock, cass::pixeldetector::CommonData::mask, cass::pixeldetector::CommonData::rows, cass::toString(), TwoD2OneD(), QSettings::value(), and cass::ACQIRIS::width.
Referenced by createCASSMask().
| void cass::pixeldetector::addSquare | ( | CommonData & | data, |
| CASSSettings & | s | ||
| ) |
add a square element to the mask
sets all pixels covered by the square to 0.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{LowerLeftX|LowerLeftY}
The lower left pixel of the square element. The indizes given are . included in the square. Default is 0|0.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{UpperRightX|UpperRightY}
The upper right pixel of the square element. The indizes given are . included in the square. Default is 1023|1023.
| data | the container containing the mask where the element should be added |
| s | the settings element to read the mask element parameters from |
Definition at line 225 of file pixeldetector_mask.cpp.
References cass::pixeldetector::CommonData::columns, cass::pixeldetector::CommonData::lock, cass::pixeldetector::CommonData::mask, cass::pixeldetector::CommonData::rows, cass::toString(), TwoD2OneD(), QSettings::value(), and cass::ACQIRIS::width.
Referenced by createCASSMask().
| void cass::pixeldetector::addTriangle | ( | CommonData & | data, |
| CASSSettings & | s | ||
| ) |
add a triangluar element to the mask
To see whether a point is within a triangle one can use barycentric coordinates. See http://en.wikipedia.org/wiki/Barycentric_coordinates_(mathematics) for details. A point within barycentric can be defined by converting to these coordinates. The bayrocentric coordinates are represented by three points A, B, C. Each point can be represented by  where
where  can be determined from
can be determined from  using the components of the triangle points and the wanted point
using the components of the triangle points and the wanted point  with these definition the following equalities are given:
with these definition the following equalities are given:
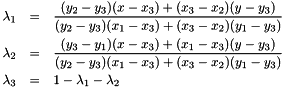
With this we know that lies within the triangluar when
![\[ 0 \leq \lambda_i \leq 1 \]](form_43.png)
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{PointA_X|PointA_Y}
The triangles first point. Default is 500|500.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{PointB_X|PointB_Y}
The triangles first point. Default is 500|500.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{PointC_X|PointC_Y}
The triangles first point. Default is 500|500.
| data | the container containing the mask where the element should be added |
| s | the settings element to read the mask element parameters from |
Definition at line 447 of file pixeldetector_mask.cpp.
References A, cass::pixeldetector::CommonData::columns, cass::pixeldetector::CommonData::mask, cass::pixeldetector::CommonData::rows, cass::toString(), TwoD2OneD(), QSettings::value(), cass::ACQIRIS::width, cass::ACQIRIS::x, and cass::ACQIRIS::y.
Referenced by createCASSMask().
| Detector::frame_t::value_type cass::pixeldetector::calcMean | ( | Detector::frame_t & | values, |
| size_t | mindisregard, | ||
| size_t | maxdisregard | ||
| ) |
calculate the mean of the distribution
before calulating the mean value of the distribution remove the nbr of elements that have the lowest values and the nbr of elements with the hightest values.
| values | the values to calculate the mean from |
| mindisregard | the number of minimum values to disregard |
| maxdisregard | the number of maximum values to disregard |
Definition at line 95 of file mapcreators.cpp.
Referenced by cass::pixeldetector::FixedMaps::loadSettings().
| Detector::frame_t::value_type cass::pixeldetector::calcMedian | ( | Detector::frame_t & | values, |
| size_t | mindisregard, | ||
| size_t | maxdisregard | ||
| ) |
calculate the median of the distribution
before calulating the median value of the distribution remove the nbr of elements that have the lowest values and the nbr of elements with the hightest values.
| values | the values to calculate the median from |
| mindisregard | the number of minimum values to disregard |
| maxdisregard | the number of maximum values to disregard |
Definition at line 118 of file mapcreators.cpp.
Referenced by cass::pixeldetector::FixedMaps::loadSettings().
| Detector::frame_t::value_type cass::pixeldetector::calcNoise | ( | const Detector::frame_t & | values, |
| const Detector::frame_t::value_type & | mean | ||
| ) |
calulate the standart deviation of distribution
| values | the values to calc the standart deviation from the mean value |
| mean | the mean value to calc the standart deviation from |
Definition at line 71 of file mapcreators.cpp.
Referenced by cass::pixeldetector::FixedMaps::operator()().
| Hit cass::pixeldetector::coalesce | ( | const CoalescingBase::pixels_t & | splitpixelslist | ) |
coalesce the pixels
Coalesce the pixels in the pixel list to an hit on the detector. The value (Z) of the pixels will be added. The position of the hit is defined by the center of mass of the pixel group. Also remember how many pixels contributed to the hit.
| splitpixelslist | The list of pixels that belong to one hit on the detector. |
Definition at line 173 of file coalesce_simple.cpp.
References hit, cass::pixeldetector::Hit::nbrPixels, cass::pixeldetector::Hit::x, cass::pixeldetector::Hit::y, and cass::pixeldetector::Hit::z.
Referenced by cass::pixeldetector::AdvancedDetector::hits(), and cass::pixeldetector::SimpleCoalesce::operator()().
| void cass::pixeldetector::copyAdditionalPnccdInfo | ( | const Pds::PNCCD::ConfigV1 & | , |
| Detector & | det, | ||
| size_t & | rowsOfSegment, | ||
| size_t & | columnsOfSegment | ||
| ) |
copy additional info about the pnCCD
No info is available, just set default values.
| cfg | unused |
| det | reference to the detector that the info will be copied to |
| rowsOfSegment | the number of rows in each segment |
| columnsOfSegment | the number of columns in each segment |
Definition at line 104 of file lcls_converter.cpp.
References cass::pixeldetector::Detector::columns(), and cass::pixeldetector::Detector::rows().
Referenced by copyPnCCDFrame().
| void cass::pixeldetector::copyAdditionalPnccdInfo | ( | const Pds::PNCCD::ConfigV2 & | cfg, |
| Detector & | det, | ||
| size_t & | rowsOfSegment, | ||
| size_t & | columnsOfSegment | ||
| ) |
copy additional info about the pnCCD
Copy all info that one can get from version 2.
| cfg | reference to the configuration |
| det | reference to the detector that the info will be copied to |
| rowsOfSegment | the number of rows in each segment |
| columnsOfSegment | the number of columns in each segment |
Definition at line 123 of file lcls_converter.cpp.
References cass::Log::add(), cass::pixeldetector::Detector::camaxMagic(), cass::pixeldetector::Detector::columns(), cass::Log::ERROR, cass::pixeldetector::Detector::info(), cass::pixeldetector::Detector::rows(), cass::pixeldetector::Detector::timingFilename(), and cass::toString().
| void cass::pixeldetector::copyCsPadFrame | ( | const Pds::Xtc * | xtc, |
| const ConfigType & | cfg, | ||
| Detector & | det | ||
| ) |
copy the cspad frame to the detector
| ConfigType | the type of configuration |
| xtc | the raw data of the detector |
| cfg | the configuration that tells what is where in the configuration |
| det | the place where the frame data should be copied to |
2 asics per segment. 8 segments per quadrant.
4 quadrants
all sections above each other
Definition at line 218 of file lcls_converter.cpp.
References cass::pixeldetector::Detector::columns(), cass::pixeldetector::Detector::frame(), and cass::pixeldetector::Detector::rows().
Referenced by cass::pixeldetector::Converter::operator()().
| void cass::pixeldetector::copyEpixFrame | ( | const Pds::Epix::ElementV3 & | element, |
| const ConfigType & | cfg, | ||
| Detector & | det | ||
| ) |
copy the epix frame to the detector
| ConfigType | the type of configuration |
| element | the epix element that contains the raw data |
| cfg | the configuration that tells what is where in the configuration |
| det | the place where the frame data should be copied to |
Definition at line 266 of file lcls_converter.cpp.
References cass::pixeldetector::Detector::columns(), data, cass::pixeldetector::Detector::frame(), and cass::pixeldetector::Detector::rows().
Referenced by cass::pixeldetector::Converter::operator()().
| void cass::pixeldetector::copyPnCCDFrame | ( | const Pds::Xtc * | xtc, |
| const ConfigType & | cfg, | ||
| Detector & | det | ||
| ) |
copy the pnCCD frame into the detector
| ConfigType | the type of configuration |
| xtc | the raw data of the detector |
| cfg | the configuration that tells what is where in the configuration |
| det | the place where the frame data should be copied to |
Definition at line 155 of file lcls_converter.cpp.
References copyAdditionalPnccdInfo(), cass::pixeldetector::Detector::frame(), and cass::toString().
Referenced by cass::pixeldetector::Converter::operator()().
| void cass::pixeldetector::createCASSMask | ( | CommonData & | data, |
| CASSSettings & | s | ||
| ) |
create the mask
a mask is created from a list of mask elements loaded form the ini file. The individual elements properties are loaded from the .ini file according to their shape.
PixelDetectors/%name%/CorrectionMaps/Mask/{size}
The number of mask elements that are part of the complete mask. Default is 0.
PixelDetectors/%name%/CorrectionMaps/Mask/%index%/{MaskElementType}
Name of the mask element. Default is "Unknown", which let the code ignore that element. Possible values are:
reset the mask before creating it
Definition at line 512 of file pixeldetector_mask.cpp.
References cass::Log::add(), addCircle(), addEllipse(), addRing(), addSquare(), addTriangle(), QSettings::beginReadArray(), data, cass::Log::DEBUG0, QSettings::endArray(), cass::pixeldetector::CommonData::mask, QSettings::setArrayIndex(), size, and QSettings::value().
Referenced by isSameSize(), and cass::pixeldetector::CommonData::loadSettings().
| void cass::pixeldetector::createPixelList | ( | const Detector::frame_t::value_type & | offset, |
| const Detector::frame_t::value_type & | noise, | ||
| const MapCreatorBase::storage_t & | storage, | ||
| size_t | pixel, | ||
| bool | exclude, | ||
| Detector::frame_t & | pixellist | ||
| ) |
create the list of pixels that are non events
create a list of all pixels from the storage. Exclude all pixels that might contain an event (photon or other).
| offset | the offset for the pixel at index pixel | |
| noise | the noise for the pixel at index pixel | |
| storage | the container for all the frames data | |
| pixel | index of the pixel that one wants to create the pixel list for. | |
| exclude | flag to show whether to exclude the pixels that potentially a photon hit | |
| [out] | pixellist | the list of pixels the are non events |
Definition at line 47 of file mapcreators.cpp.
Referenced by cass::pixeldetector::FixedMaps::operator()().
calculate the scalar product of two indices
perform operation 
| lhs | the left hand side of the operation |
| rhs | the right hand side of the opeation |
Definition at line 126 of file pixeldetector_mask.cpp.
| vector<uint8_t> cass::pixeldetector::extractPayload | ( | const Pds::Xtc * | xtc | ) |
copy payload of xtc into a bytearray
create a byte array of the right size and copy the payload of the xtc to it.
| xtc | the xtc whos payload should be copied. |
Definition at line 85 of file lcls_converter.cpp.
Referenced by cass::pixeldetector::Converter::operator()().
| void cass::pixeldetector::findNeighbours | ( | uint16_t | depth, |
| const uint16_t | maxDepth, | ||
| Pixel & | pixel, | ||
| Direction::direction | direction, | ||
| const Frame & | frame, | ||
| CoalescingBase::pixels_t & | pixels, | ||
| CoalescingBase::pixels_t & | splitpixelslist | ||
| ) |
find all neighbours of a pixel
This function is meant to be called recursively only to a depth of 5. First it will add the pixel that is passed to this function to the split pixel list and is marked as used. Then it will try to find another pixel in the pixellist of the frame, that is a neighbour of that pixel. It will search whether there is a pixel above, underneath, left or right from the pixel and call this function for this pixel recursively and increases the depth by one. As parameter it will also tell the callee where the orignal pixel was, so that when checking for neightbours we can omit the directions we came from.
This idea was inspired by Tom White.
| depth | The recursive depth of calling this function |
| maxDepth | The maximum allowed recursive depth of calling this function |
| pixel | The pixel whos neighbours we are searching for |
| direction | The direction that we came from |
| frame | Reference to the frame containing the frame data an info about the coulumns and rows of the frame. |
| pixels | the list of pixels that should be coalesced |
| splitpixelslist | Reference to the list of pixels that have neighbours The event (hit) that all these pixels belong to has been split among the pixels in this list. |
check for neighbour to the west
check for neighbour to the east
check for neighbour to the north
check for neighbour to the south
Definition at line 95 of file coalesce_simple.cpp.
References cass::pixeldetector::Frame::columns, cass::pixeldetector::Direction::east, cass::pixeldetector::Direction::north, cass::pixeldetector::Frame::rows, cass::pixeldetector::Direction::south, cass::pixeldetector::Pixel::used, cass::pixeldetector::Direction::west, cass::pixeldetector::Pixel::x, and cass::pixeldetector::Pixel::y.
Referenced by cass::pixeldetector::SimpleCoalesce::operator()().
| Detector::frame_t::value_type cass::pixeldetector::getConstant | ( | const containerType & | ) |
get a constant 1
| the | type of container for which the constant should be returned |
| container | unused |
Definition at line 37 of file pixel_detectors.cpp.
| Detector::frame_t::value_type cass::pixeldetector::getZValue | ( | const containerType & | container | ) |
retrieve the z value of the container
| the | type of container for which the z value should be returned |
| container | the container that contains the z value |
Definition at line 51 of file pixel_detectors.cpp.
| void cass::pixeldetector::isSameSize | ( | const Frame & | frame, |
| CommonData & | data | ||
| ) |
check whether the frame has the same size as the maps.
if not resize the maps to the right size and initialize them with values, that will let the hitfinder find no pixels and the correction make does not alter the frame.
this function relys on that the maps are locked. Usually they are since this is called by the operators of the map creators. These are locked because the function calling the operators will lock the maps before.
| frame | the Frame to check |
| data | the container for all maps. |
Definition at line 436 of file common_data.cpp.
References cass::Log::add(), QSettings::beginGroup(), cass::pixeldetector::Frame::columns, cass::pixeldetector::CommonData::columns, cass::pixeldetector::CommonData::correctionMap, createCASSMask(), cass::pixeldetector::CommonData::createCorMap(), cass::pixeldetector::CommonData::detectorname, QString::fromStdString(), cass::pixeldetector::CommonData::gain_cteMap, cass::pixeldetector::CommonData::hotpixels, cass::pixeldetector::CommonData::lock, cass::pixeldetector::CommonData::mask, cass::pixeldetector::CommonData::noiseMap, cass::pixeldetector::CommonData::offsetMap, cass::pixeldetector::Frame::rows, cass::pixeldetector::CommonData::rows, cass::toString(), and cass::Log::WARNING.
| index_t cass::pixeldetector::OneD2TwoD | ( | const size_t | linearisedIndex, |
| const size_t | width | ||
| ) |
convert linearised index to matrixindex
| linearisedIndex | the linearized index in the matrix |
| width | the width of the matrix |
Definition at line 153 of file pixeldetector_mask.cpp.
operates times on two indices
performs  .
.
| lhs | the left hand side of the operation |
| rhs | the right hand side of the opeation |
Definition at line 79 of file pixeldetector_mask.cpp.
operates a plus on two indices
performs  .
.
| lhs | the left hand side of the operation |
| rhs | the right hand side of the opeation |
Definition at line 47 of file pixeldetector_mask.cpp.
operates a minus on two indices
performs  .
.
| lhs | the left hand side of the operation |
| rhs | the right hand side of the opeation |
Definition at line 63 of file pixeldetector_mask.cpp.
operates devides on two indices
performs  .
.
| lhs | the left hand side of the operation |
| rhs | the right hand side of the opeation |
Definition at line 95 of file pixeldetector_mask.cpp.
| bool cass::pixeldetector::operator< | ( | const indexf_t & | lhs, |
| const indexf_t::first_type | rhs | ||
| ) |
operates less of an indices to a scalar
performs  .
.
| lhs | the left hand side of the operation |
| rhs | the right hand side of the opeation |
Definition at line 111 of file pixeldetector_mask.cpp.
| void cass::pixeldetector::readCASSGainFile | ( | const string & | filename, |
| CommonData & | data | ||
| ) |
read the CASS generated gain file
| filename | the filename of file containing the gain maps. |
| data | the data storage where the info should be written to. |
Definition at line 337 of file common_data.cpp.
References cass::Log::add(), cass::pixeldetector::CommonData::gain_cteMap, cass::pixeldetector::CommonData::lock, size, and cass::Log::WARNING.
Referenced by cass::pixeldetector::CommonData::loadSettings().
| void cass::pixeldetector::readCASSHotPixFile | ( | const string & | filename, |
| CommonData & | data | ||
| ) |
read the CASS generated hotpixels file
| filename | the filename of file containing the hot pixel mask. |
| data | the data storage where the info should be written to. |
Definition at line 382 of file common_data.cpp.
References cass::Log::add(), cass::pixeldetector::CommonData::hotpixels, cass::pixeldetector::CommonData::lock, size, and cass::Log::WARNING.
Referenced by cass::pixeldetector::CommonData::loadSettings().
| void cass::pixeldetector::readCASSOffsetFile | ( | const string & | filename, |
| CommonData & | data | ||
| ) |
will read the file containing the offset and noise map in the former CASS format
open the file then determine its size from which one can extract the size of the frame. Then read data into temporary containers for double and then copy the data to the final float containers
| filename | the filename of file containing the offset and noise maps. |
| data | the data storage where the info should be written to. |
Definition at line 170 of file common_data.cpp.
References cass::Log::add(), cass::pixeldetector::CommonData::lock, cass::pixeldetector::CommonData::noiseMap, cass::pixeldetector::CommonData::offsetMap, size, and cass::Log::WARNING.
Referenced by cass::pixeldetector::CommonData::loadSettings().
| void cass::pixeldetector::readHLLGainFile | ( | const string & | filename, |
| CommonData & | data | ||
| ) |
will read the file containing the gain and cte corretion factors in the HLL format
read in HLL gain/CTE correction format from a given file. If no filename is given just return from the function without doing anything.
the first four lines look like the following
HE File containing gain and CTE values VERSION 3 HE #Column Gain CTE0 GC 0 1 0.999977 [...]
the third line and following lines have different spacing, depending on how xonline is writing these files.
column is related to the way the ccd is read out. The ccd consists of four segments
BC AD
that are placed ABCD for the HLL file format with the following numbers
1023 <- 512 1535 <- 1024
0 -> 512 1536 -> 2048
The segments are read out bottom up for AD and top down for BC (actually shifted to the corresponding edge).
The memory representation is continuously
... 1024 -> 2047 0 -> 1023
| filename | the filename of file containing the offset and noise maps. |
| data | the data storage where the info should be written to. |
Definition at line 266 of file common_data.cpp.
References cass::Log::add(), cass::pixeldetector::CommonData::gain_cteMap, cass::hllDataTypes::HLL2CASS(), cass::pixeldetector::CommonData::lock, and cass::Log::WARNING.
Referenced by cass::pixeldetector::CommonData::loadSettings().
| void cass::pixeldetector::readHLLOffsetFile | ( | const string & | filename, |
| CommonData & | data | ||
| ) |
will read the file containing the offset and noise map in the hll format
The Hll darkcal file format starts with a 1024 bit long header. Then an array of staDataType objects containing more info than just the offset (mean) and the noise (sigma) of the pixels.
After that data a list of chars containing the bad pixel map is recorded. The length of the arrays is according to the size of the frame.
The header first contains a string to identify that it is a proper darkcal file "HE pixel statistics map". Then it is followed by the following the height, the width and the overall length of the frame. See HllFileHeader for details.
since the arrays for the offset and noise map are in the HLL layout, we need to copy the individual information from the staDataType structure to temporary arrays, which we then can convert to the layout that CASS is using.
| filename | the filename of file containing the offset and noise maps. |
| data | the data storage where the info should be written to. |
Definition at line 63 of file common_data.cpp.
References cass::Log::add(), cass::hllDataTypes::HLL2CASS(), cass::pixeldetector::CommonData::lock, cass::pixeldetector::CommonData::mask, cass::pixeldetector::CommonData::noiseMap, cass::pixeldetector::CommonData::offsetMap, cass::toString(), and cass::Log::WARNING.
Referenced by cass::pixeldetector::CommonData::loadSettings().
| Detector& cass::pixeldetector::retrieveDet | ( | CASSEvent & | evt, |
| const Device::detectors_t::key_type & | key | ||
| ) |
extract the right detector from the CASSEvent
check whether the device that contains the detector is present in the CASSevent if not throw a runtime error
| evt | the cassvent containing the detector |
| key | key of the detector within the map of the device holding the devices |
Definition at line 64 of file lcls_converter.cpp.
References cass::pixeldetector::Device::dets(), cass::CASSEvent::devices(), and cass::CASSEvent::PixelDetectors.
Referenced by cass::pixeldetector::Converter::operator()().
| void cass::pixeldetector::saveCASSGainFile | ( | const string & | filename, |
| const CommonData & | data | ||
| ) |
save the gain map to CASS style file
| filename | the filename of file were the gains will be written to |
| data | the data storage where the info should be taken from. |
Definition at line 362 of file common_data.cpp.
References cass::pixeldetector::CommonData::gain_cteMap.
Referenced by cass::pixeldetector::CommonData::loadSettings().
| void cass::pixeldetector::saveCASSHotPixFile | ( | const string & | filename, |
| const CommonData & | data | ||
| ) |
save the hot pixels to CASS style file
| filename | the filename of file were the hot pixel mask will be written to |
| data | the data storage where the info should be taken from. |
Definition at line 408 of file common_data.cpp.
References cass::pixeldetector::CommonData::hotpixels.
Referenced by cass::pixeldetector::CommonData::loadSettings().
| void cass::pixeldetector::saveCASSOffsetFile | ( | const string & | filename, |
| CommonData & | data | ||
| ) |
will save the file containing the offset and noise map in the former CASS format
write the offset and noise map into a file. The values will just be written in a binary stream of doubles.
The maps are still locked by the createMaps lock when writing.
| filename | the filename of file containing the offset and noise maps. |
| data | the data storage where the info should be written to. |
Definition at line 205 of file common_data.cpp.
References cass::pixeldetector::CommonData::noiseMap, and cass::pixeldetector::CommonData::offsetMap.
Referenced by cass::pixeldetector::CommonData::loadSettings().
| void cass::pixeldetector::saveHLLOffsetFile | ( | const string & | filename, |
| CommonData & | data | ||
| ) |
save the maps to a hll type darkcal file
see readHLLOffsetFile for details about the fileformat. There is no need to lock the maps since they are still locked by the lock started in createMaps
| filename | the name of the file to write the data to |
| data | the container including the maps to write to file |
Definition at line 120 of file common_data.cpp.
References cass::hllDataTypes::CASS2HLL(), cass::pixeldetector::CommonData::columns, cass::hllDataTypes::DarkcalFileHeader::length, cass::pixeldetector::CommonData::mask, cass::pixeldetector::CommonData::noiseMap, cass::pixeldetector::CommonData::offsetMap, cass::hllDataTypes::DarkcalFileHeader::rows, and cass::pixeldetector::CommonData::rows.
Referenced by cass::pixeldetector::CommonData::loadSettings().
| bool cass::pixeldetector::shouldCoalescePixel | ( | const CoalescingBase::pixels_t & | splitpixelslist, |
| const float | mipThreshold, | ||
| const Frame & | frame | ||
| ) |
check whether list of pixel should be coalesced
Checks whether the pixels in the list are a massiv ionizing particle (MIP) candidate. This means whether the value (z) of that pixel is above a user set threshold. If this is true then the list should not be coalesced. Then check whether one of the neighbouring pixels in the raw frame is 0. This means that it has been marked as bad by either the darkframe calibration or by the user.
| splitpixelslist | The list of pixels that belong to one hit on the detector. |
| mipThreshold | The threshold above which a pixel is identified as MIP signature |
| frame | The frame of this detector |
Definition at line 215 of file coalesce_simple.cpp.
References cass::pixeldetector::Frame::columns, cass::pixeldetector::Frame::data, data, and cass::pixeldetector::Frame::rows.
Referenced by cass::pixeldetector::SimpleCoalesce::operator()().
| size_t cass::pixeldetector::TwoD2OneD | ( | const index_t & | matrixIndex, |
| const size_t | width | ||
| ) |
convert matrix index to linearised index
| matrixIndex | in the matrix |
| width | the width of the matrix |
Definition at line 140 of file pixeldetector_mask.cpp.
Referenced by addCircle(), addEllipse(), addRing(), addSquare(), and addTriangle().
 1.8.10
1.8.10

